
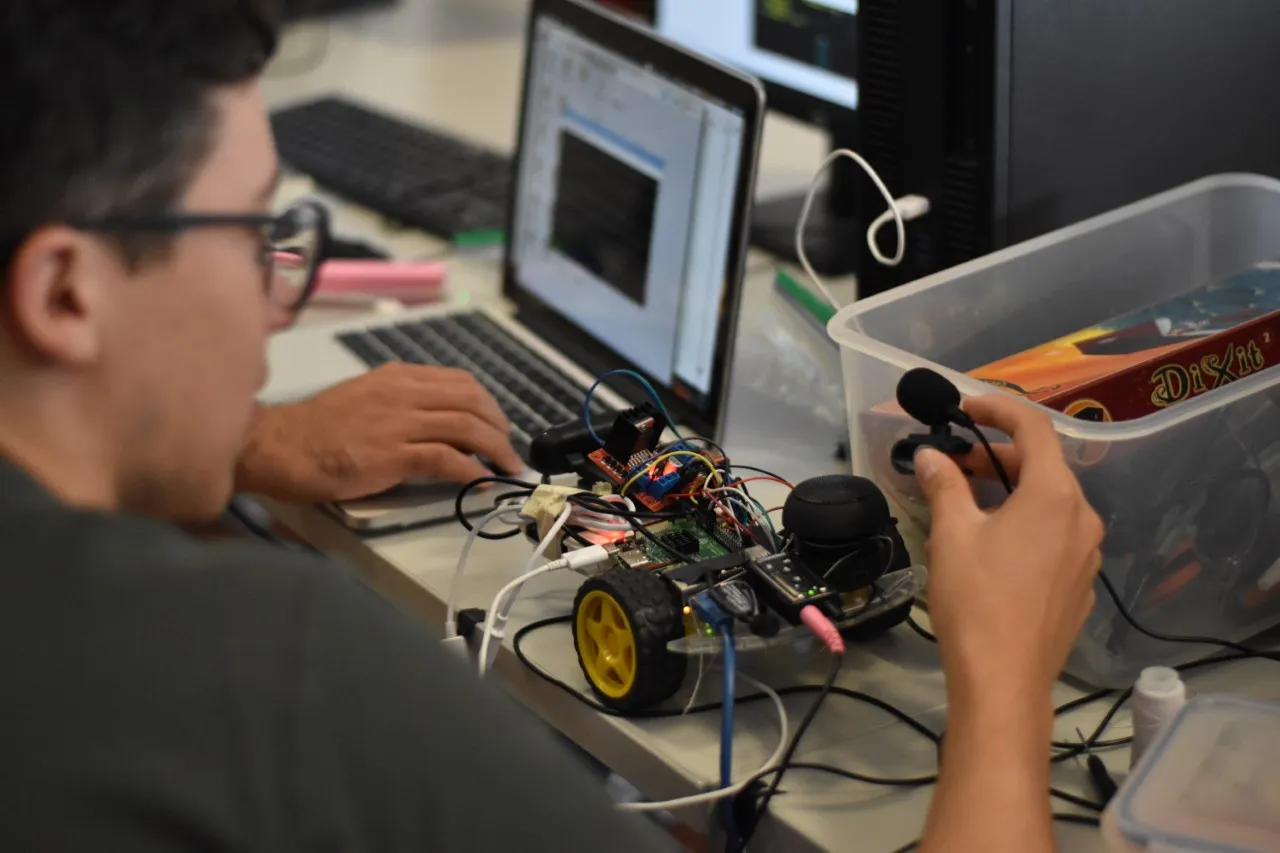
Durante la Semana i el proyecto "ROVER-PI" fue llevado a cabo con el propósito de construir un vehículo autónomo. El automóvil cuenta con sensores, bocina, micrófono, cámara, entre otros. Estos componentes son los que hacen posible las diversas aplicaciones que puede tener como auto explorador; entre las cuales, en un futuro, está el lograr detectar personas atrapadas entre los escombros.
Con los recientes eventos ocurridos en diversas partes de México, este "carrito" podría ser utilizado en casos de desastres naturales. El sismo ocurrido en la Ciudad de México, es un ejemplo en el que el el auto podría ser enviado para buscar personas entre los escombros, en lugar de enviar a una persona o a un perro.
Este proyecto se desarrolla durante la Semana i, la cual tiene entre sus objetivos desarrollar o fortalecer el espíritu emprendedor en los alumnos, además de otras competencias disciplinarias o transversales como en este caso, el sentido humano en los estudiantes que trabajan en el fin que tiene "ROVER-PI".
Para un mejor funcionamiento, al "carrito" autónomo se le puede integrar una cámara térmica e identificar el calor humano, para de esta manera, conocer en dónde se encuentra la persona, ya que cuenta con un GPS para localizar al robot en tiempo real, e incluso comunicarse con la persona afectada.
Además, existe otro método para buscar entre los escombros, ya que "el carrito" puede ser manipulado mediante la computadora, es decir, manejado por un operador manualmente para buscar personas con una cámara de visión nocturna.
También, el automóvil cuenta con un micrófono y bocina, con los que se podrían escuchar sonidos bajo los escombros; si alguien pidiera ayuda, el operador podría oírlo a través de la computadora y dirigir "el carrito" hacia donde se escuchó a la persona.
Notas Relacionadas


